

分類:ハーネスアセンブリ

一、シグナルの完全性と外部干渉リスク
非常に細い同軸線束は、サイズが小さいため、短い伝送距離でロボット内部のモーターやスイッチング電源、無線モジュールなどの機器の電磁干渉を受けやすいです。これらの干渉は、信号の歪みや画像のフレームの欠如、誤码を引き起こし、視覚システムの性能に大きな影響を与えます。したがって、信号の完全性を確保することは、設計における最も重要な課題となります。
二、全方向的遮蔽および接地設計
360°金属屏蔽は効果的な干渉防止策であり、外層の屏蔽によって法拉第籠を形成し、外部の電磁信号の侵入を防ぎ、線内の信号の漏洩を阻止します。屏蔽材はアルミ箔、金属織物網または複合構造を選択し、柔軟性と屏蔽性能をバランス良く兼ねます。屏蔽層はデバイスの筐体に信頼性のある接地が必要で、複数の接地設計を取り入れることで共模干渉を低減し、システムの電磁環境を安定化します。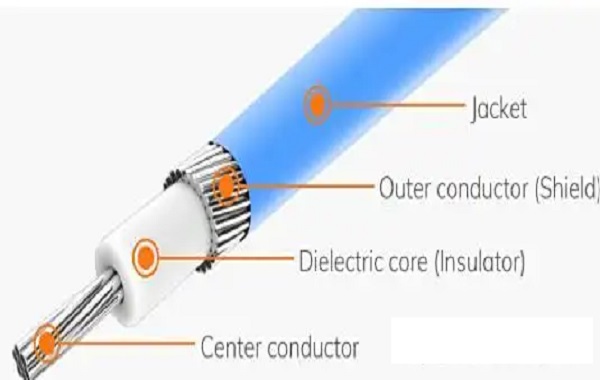
三、磁珠フィルタリングと適切な配線
ラインの重要なノードに、鉄氧体磁珠やフィルタを取り付け、高周波の共模ノイズを吸収し、シグナルに追加の保護層を提供します。同時に、布線を合理的に計画し、高電力の電源線やサーボ電機線と並行または交差しないようにし、曲げ半径を制御して、機械的なストレスがシールドの完全性を破壊することを防ぎ、シグナルの安定性を確保します。
第4章 差分マッチングと検証テスト
もしカメラモジュールが差分信号伝送を用いる場合、P/Nラインの長さを一致させる必要があります。これにより、内差遅延による電場非対称を避けることができます。優れたインピーダンスマッチングは、反射と串扰を低下させ、伝送品質を向上させます。最終的な設計は、EMCテスト、スペクトル分析、および屏蔽効果の測定を通じて確認されるべきで、非常に細い同軸線束が複雑な電磁環境で高速で、誤りが少ない、安定した画像伝送を達成できることを確保する必要があります。
免責内容












